
前回説明書どおりに組み立ててみたタミヤ カムプログラムロボット工作セットに、Arduinoを載せてみようと思います。

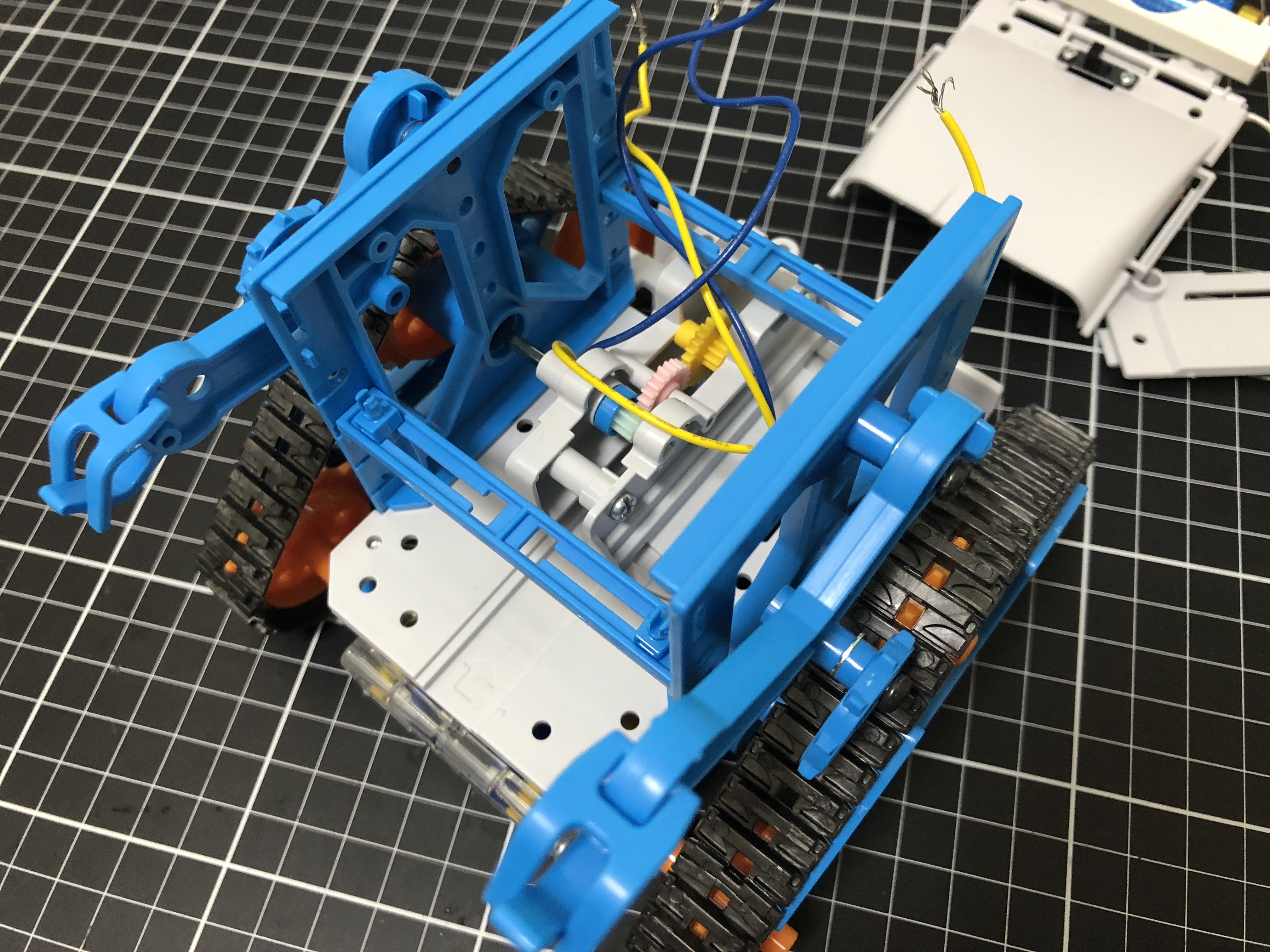
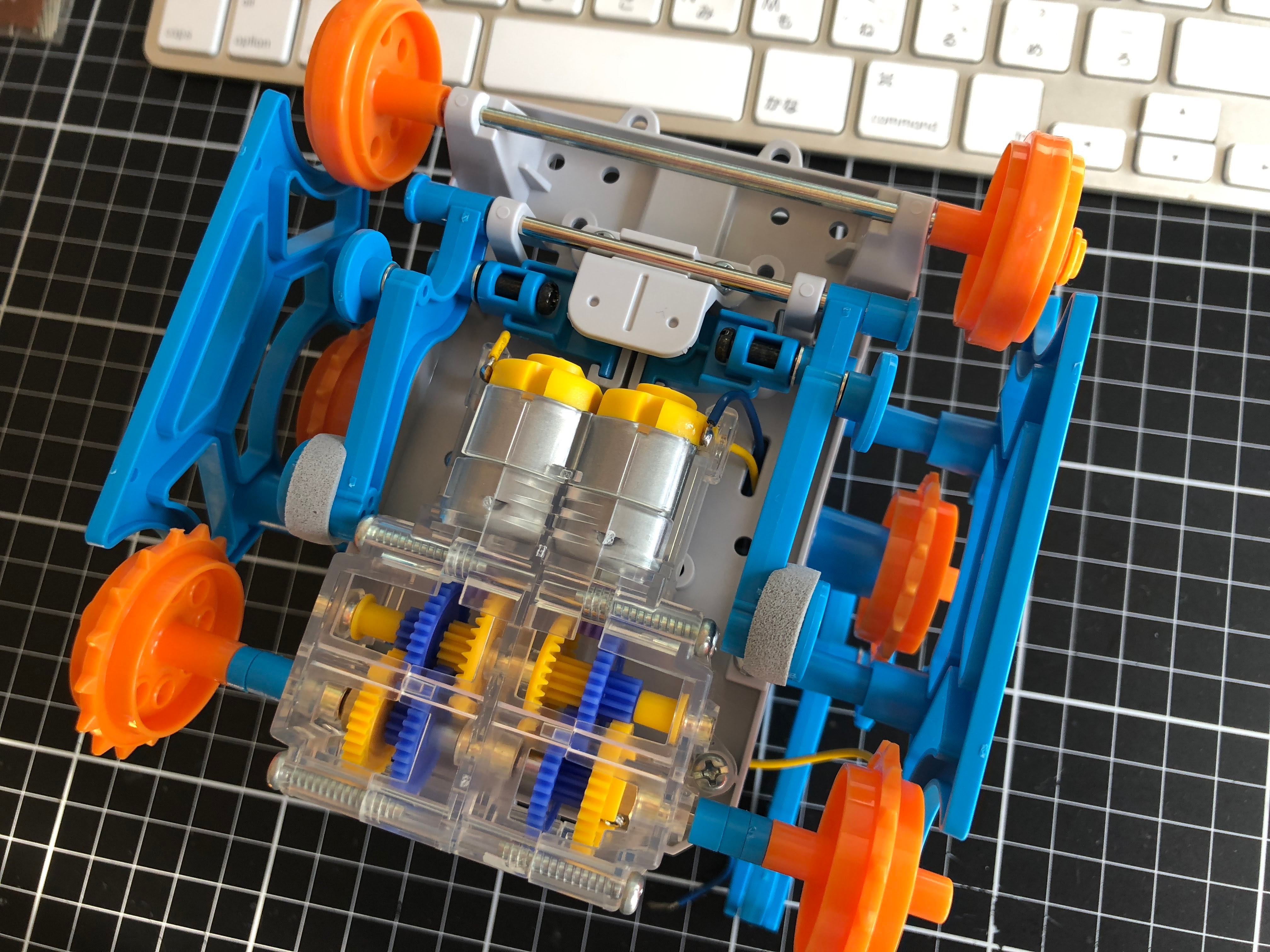
こちらがノーマル状態のカムプログラムロボット。

プログラムバー関連の部品を取り外す
制御をArduinoから直接行うようにするため、プログラムバー関係の部品は不要なので外していきます。まずは頭の部分を外します。
次にプログラムバーギヤケースへシャフトが伸びているほうのサイドカバーを外します。
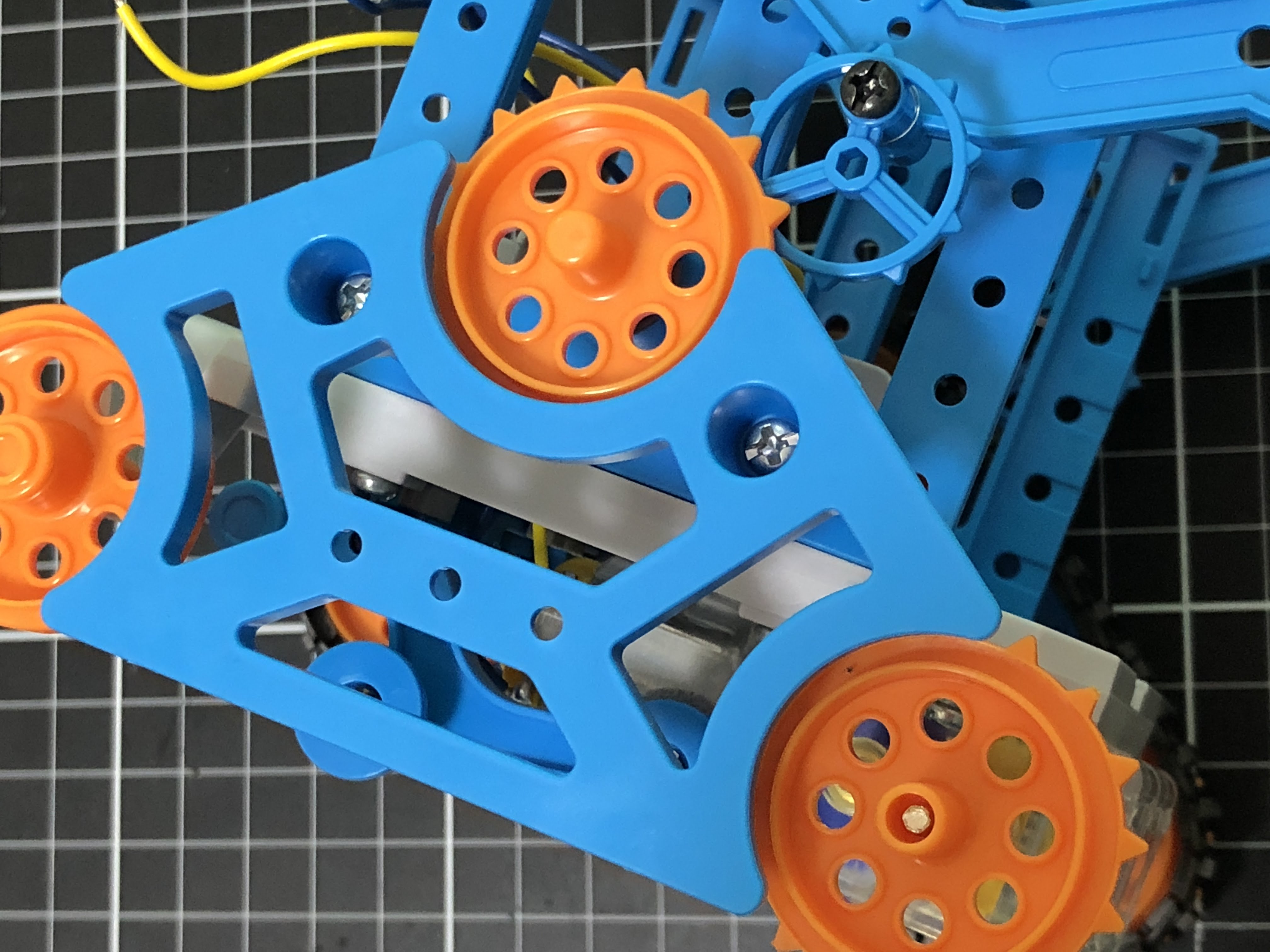
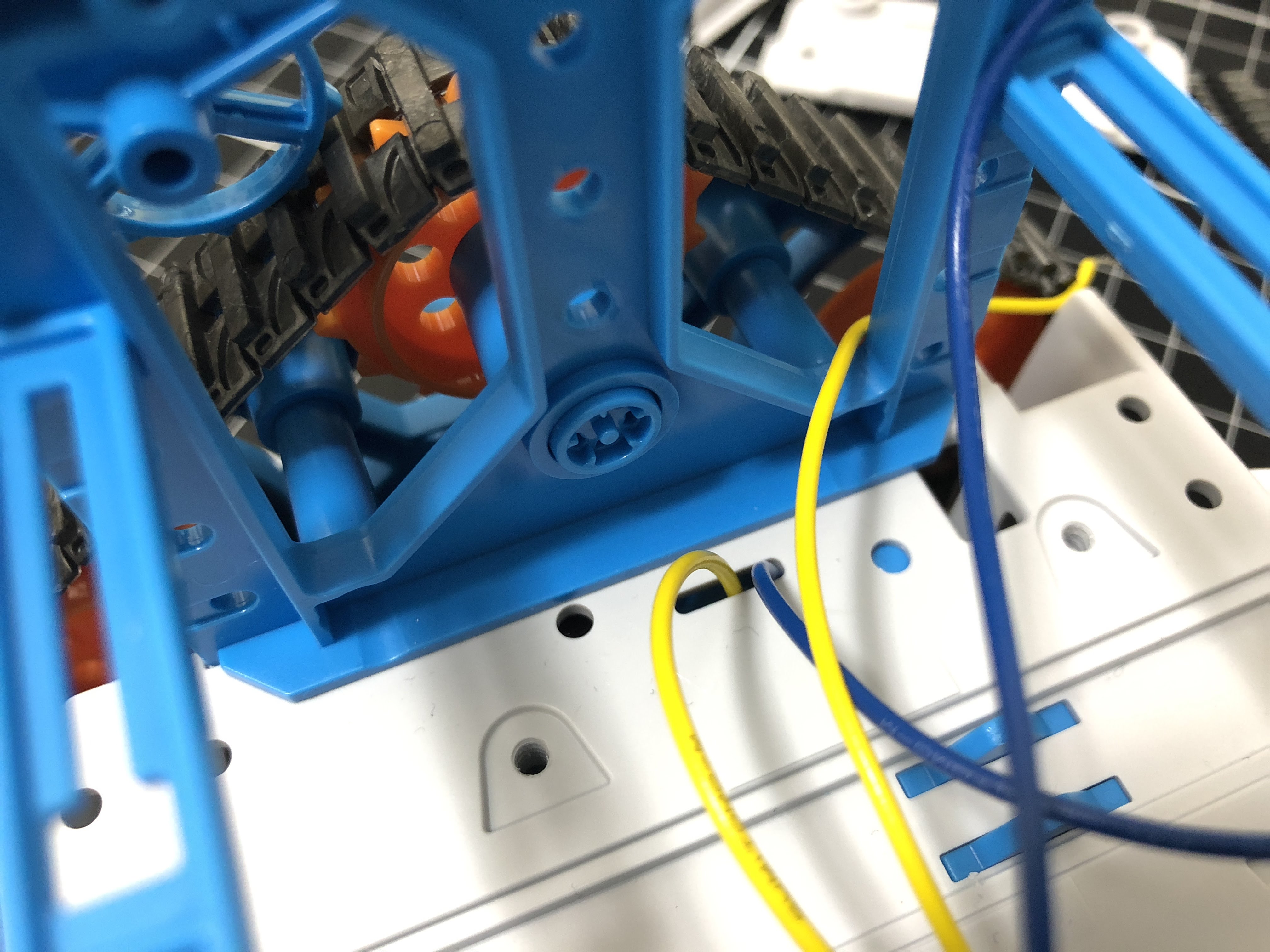
このようにキャタピラーが回ることでプログラムバーギアケースに動力が伝わるようになっているため、このシャフトも外します。

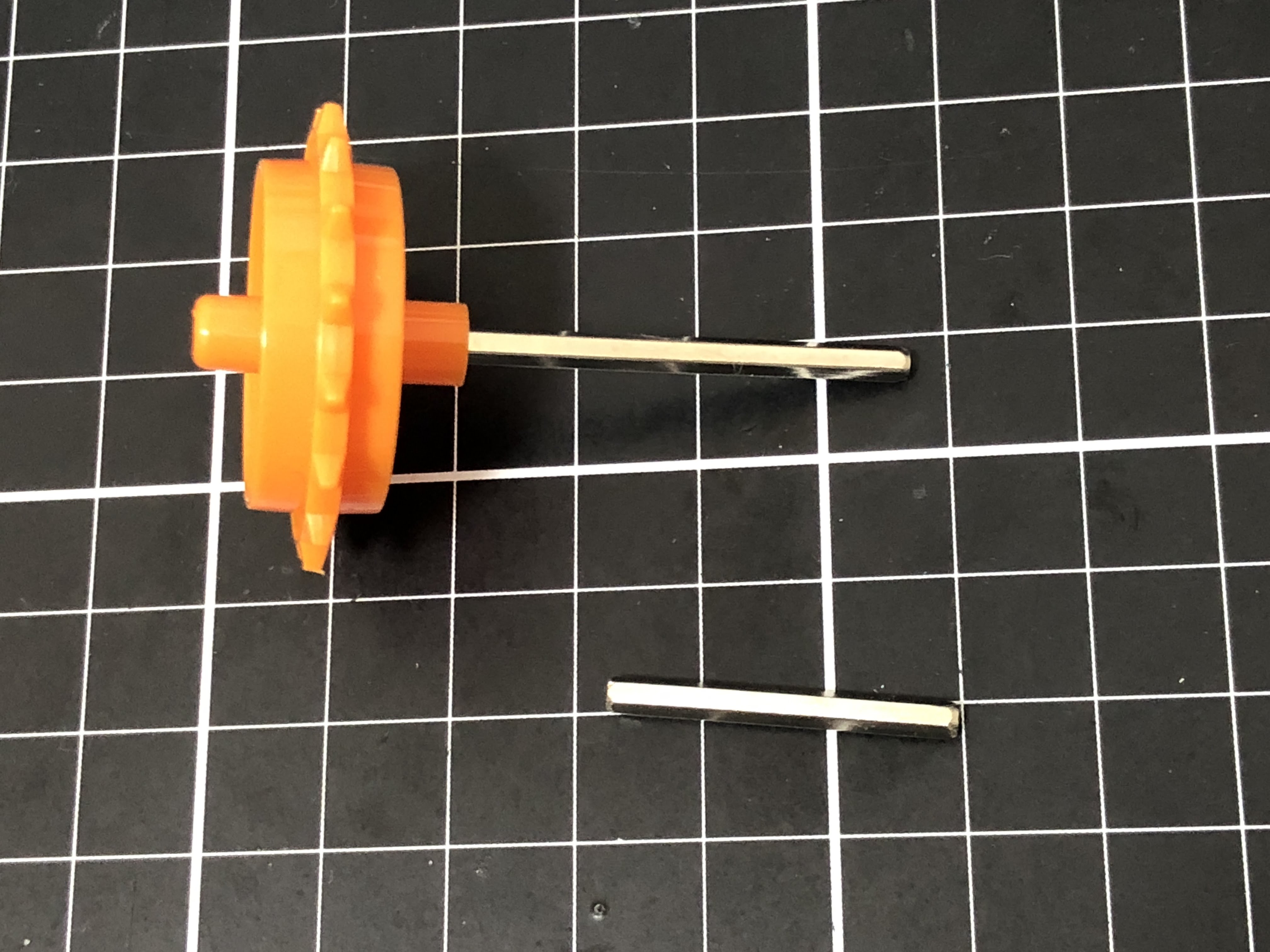
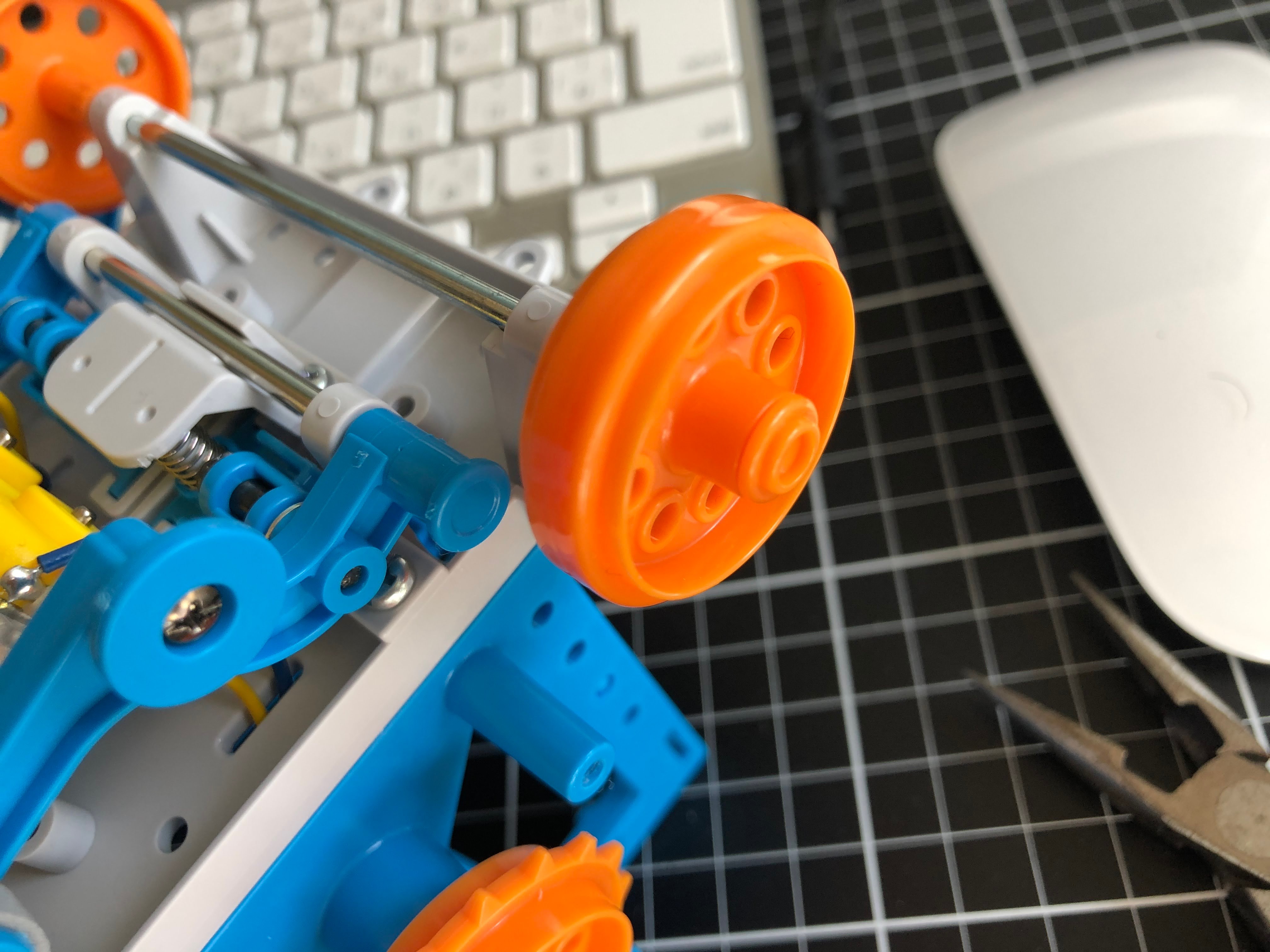
長いシャフトからキットに1本余っているはずの短いシャフトに変更します。
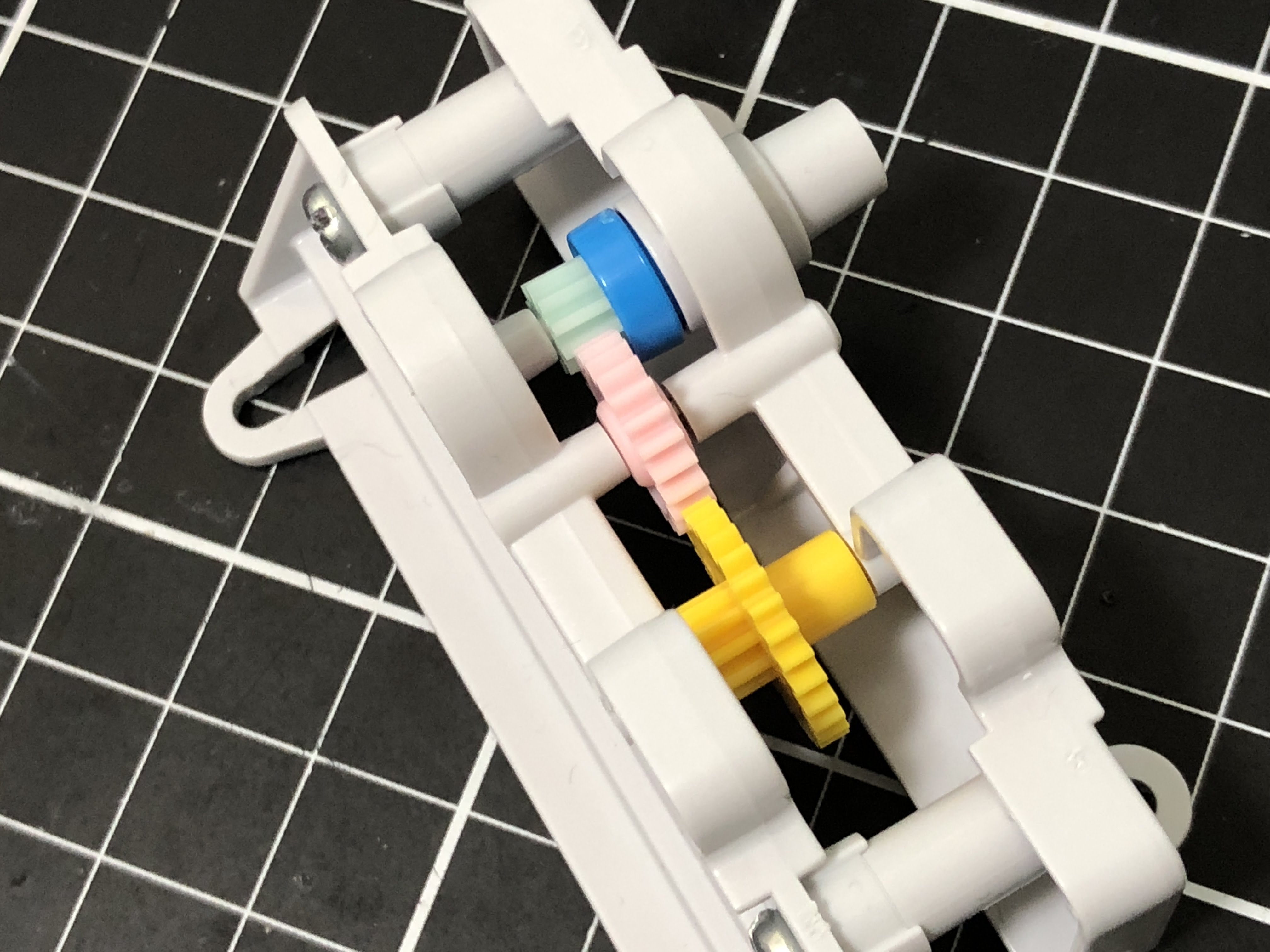
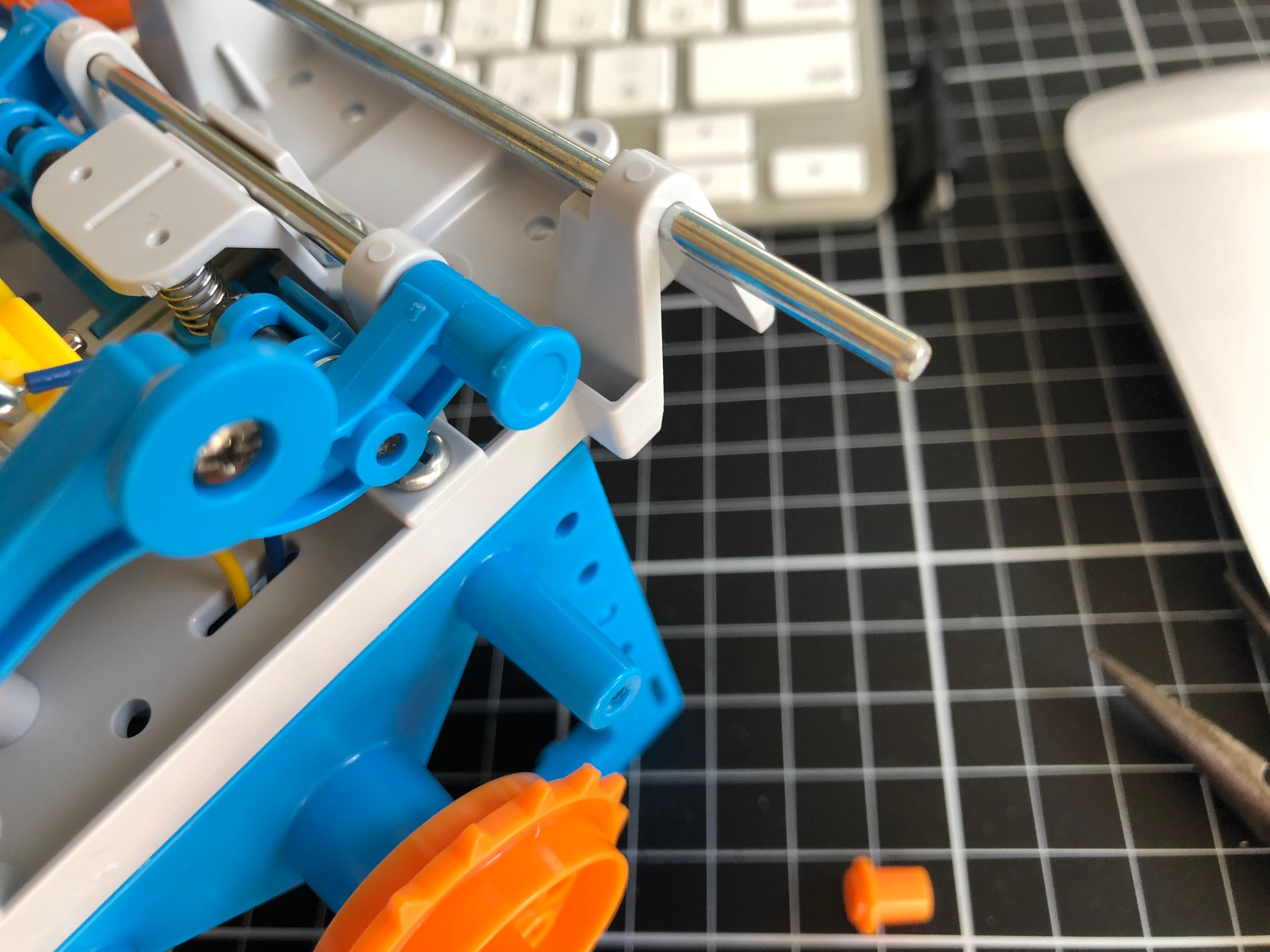
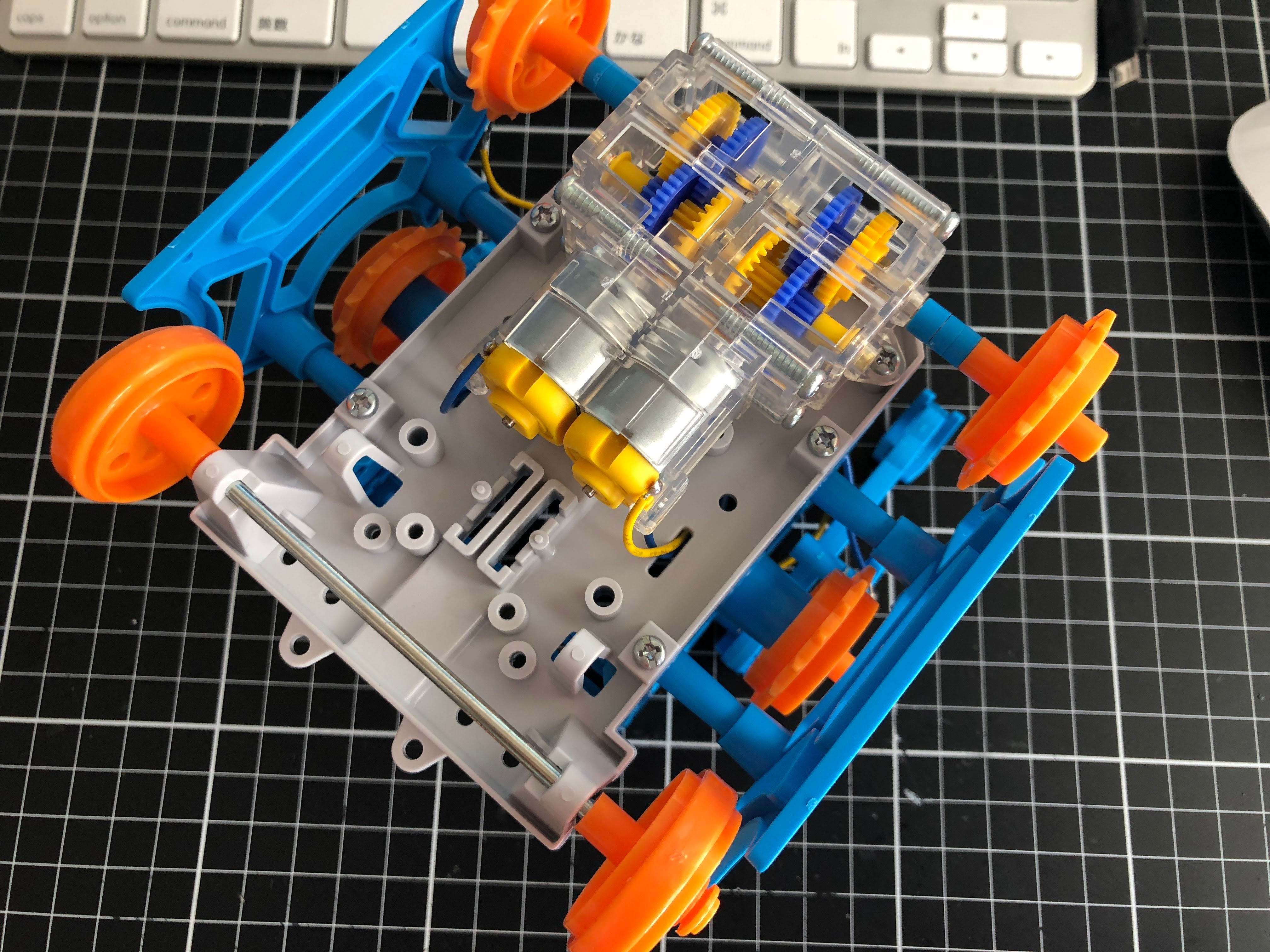
そしてプログラムバーギヤケース自体も取り外します。水色の部品をシャフト固定に使用するのでこれも取り外します。
反対側と同じように取り外したパーツでシャフトを固定します。
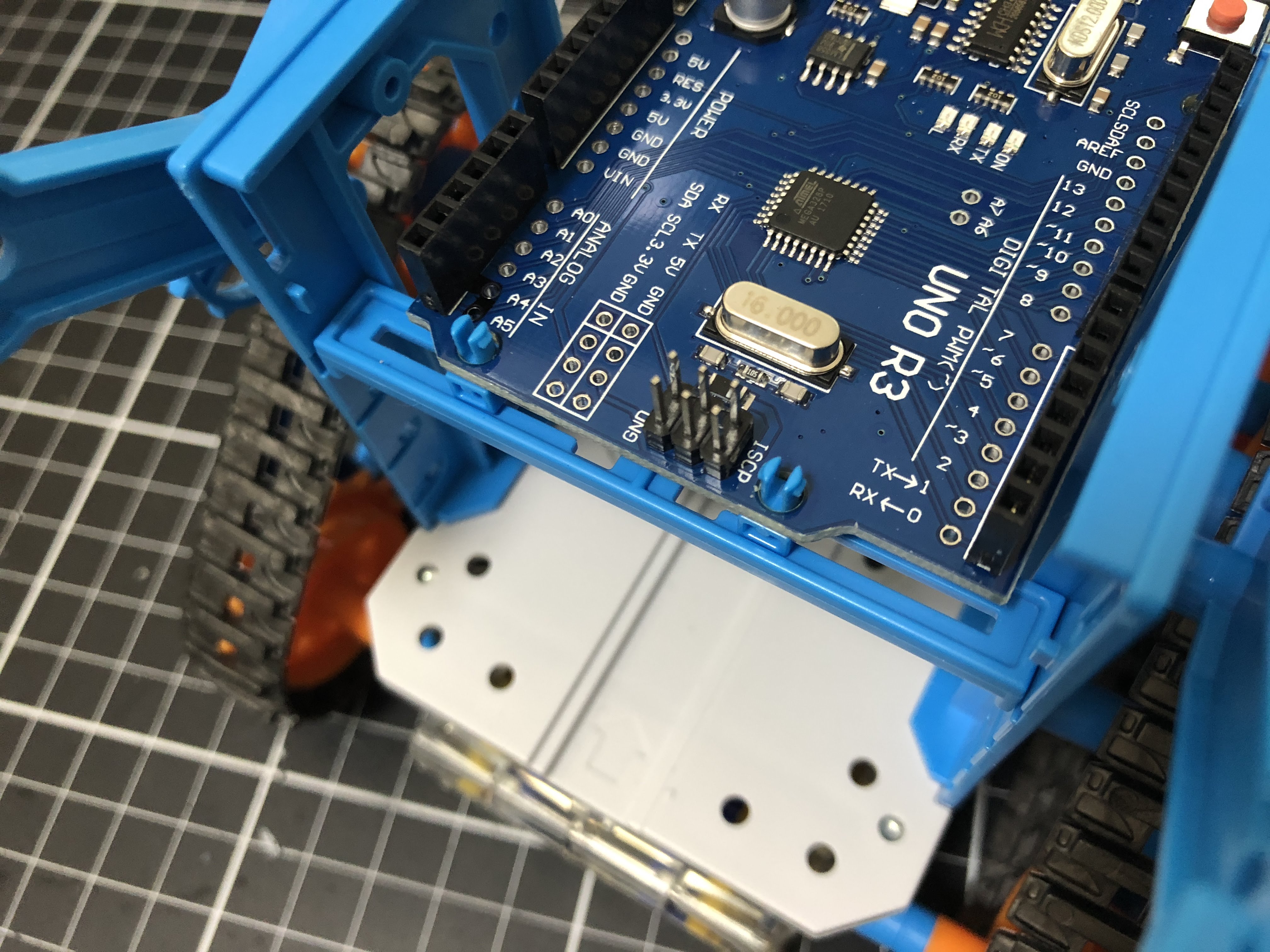
本来はステアリングレッグも不要なので取り外したいところですが、一旦ここまででArduinoを載せてみます。説明書にも記載があるように、サイドフレームサポートを使ってネジを使うことなく固定できます。後ろ側は乗っかっているだけですが外れることはなさそうです。
ステアリングレッグを取り外す
ステアリングレッグも不要なので取り外して行きます。シャーシ(B2パーツ)に出ているステアリングレッグの青い突起が気にならないようでしたら、ステアリングレッグは残したままにしてもいいかもしれません。
まず片方のサイドカバーを取り外します。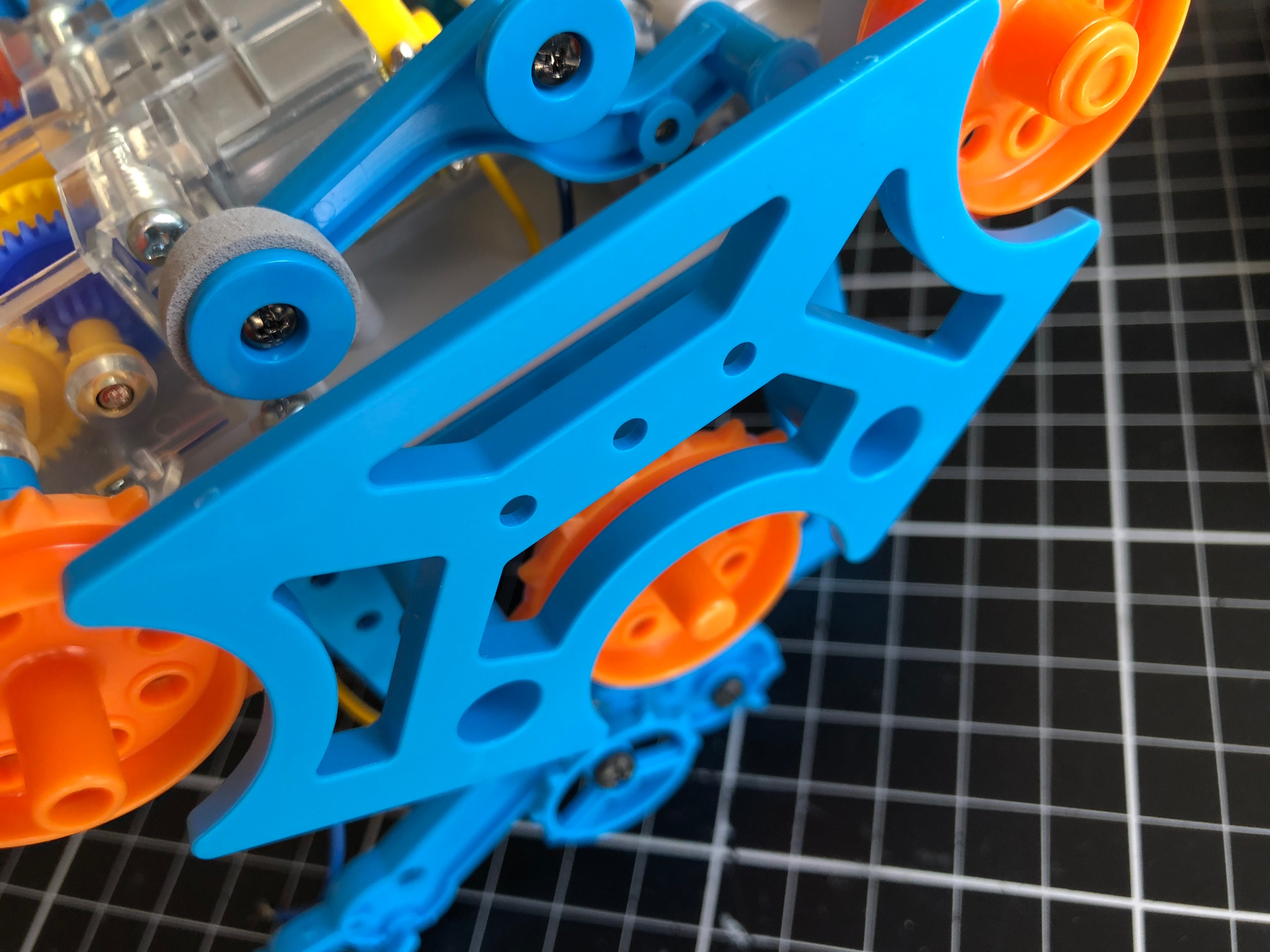
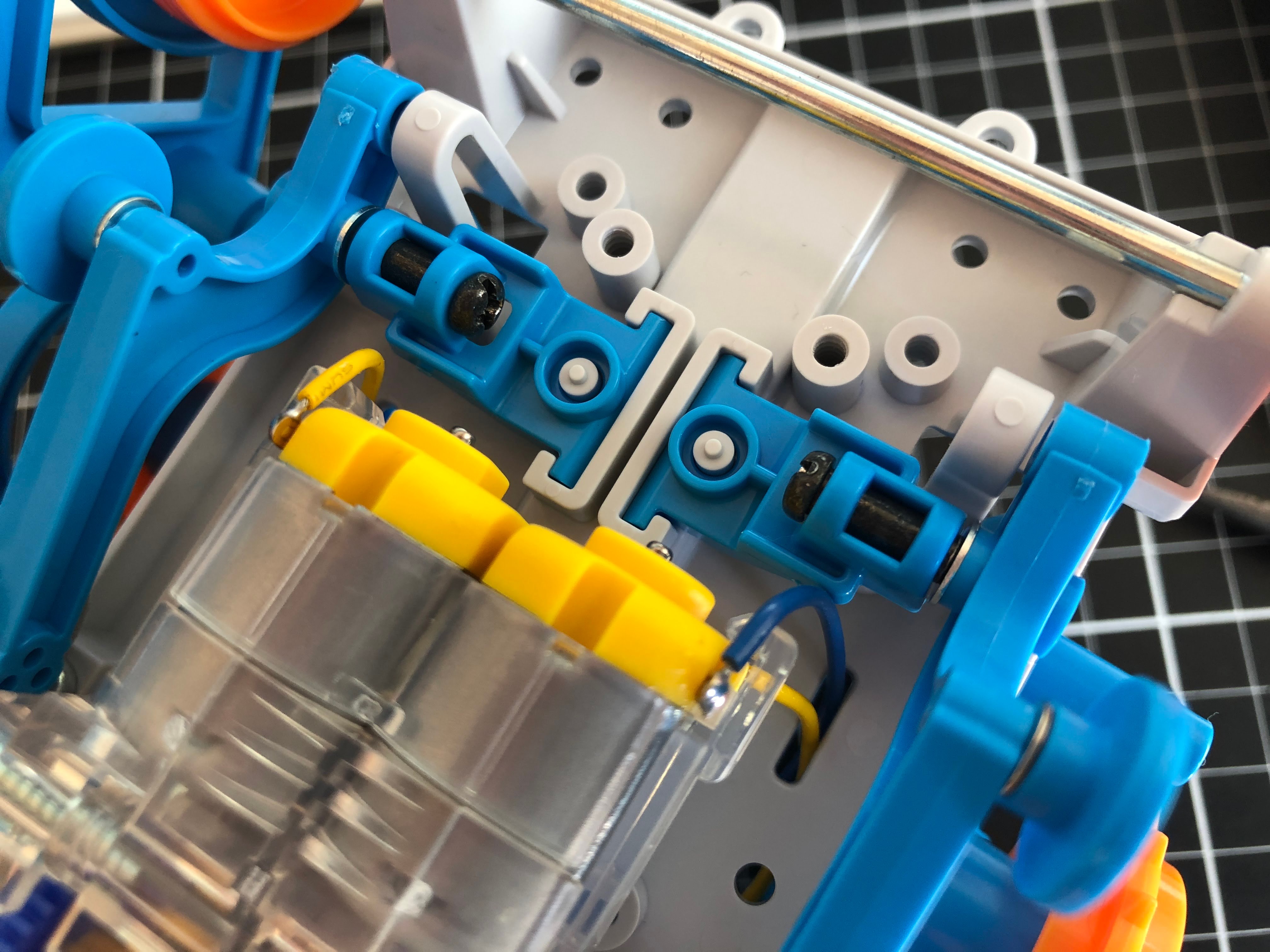
青いキャップのシャフトを外したいのですが、干渉するので一度ホイールも外します。
青いキャップを外して、シャフトを抜きます。
ビスを2つ外して、ステアリングレッグをおさえているグレーのパーツを取り外します。バネがあるので一緒に外しておきます。
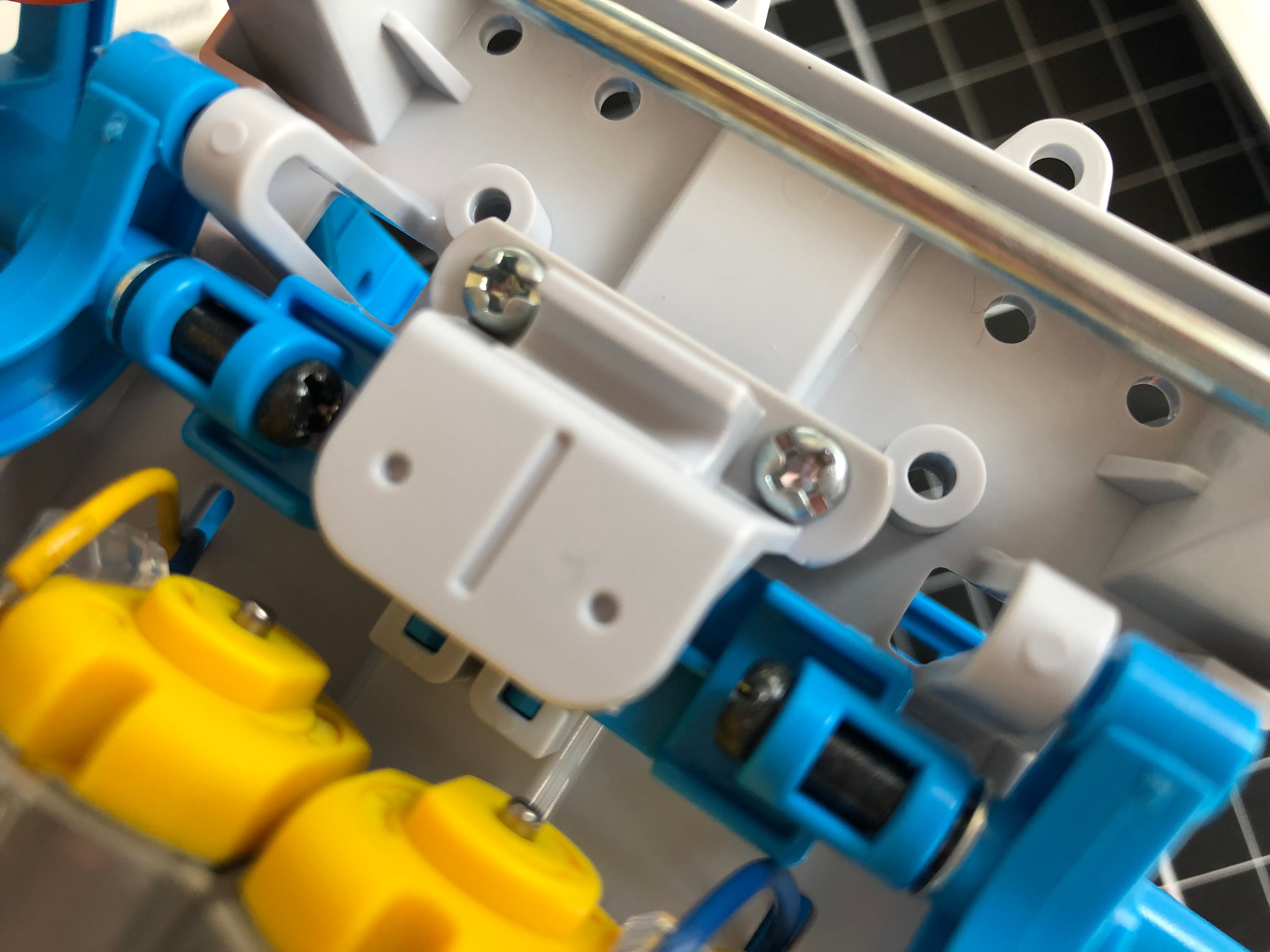
ステアリングレッグが取り外せるようになりました。
サイドカバーを元に戻して完成です。底面がだいぶスッキリしました。
次回は実際にArduinoでモーターを制御してみたいと思います。